КНТН-3-3
Руководитель проекта: М.В. Болсуновская
Лаборатория «Промышленные системы потоковой обработки данных» Передовой инженерной школы СПбПУ
Цель:
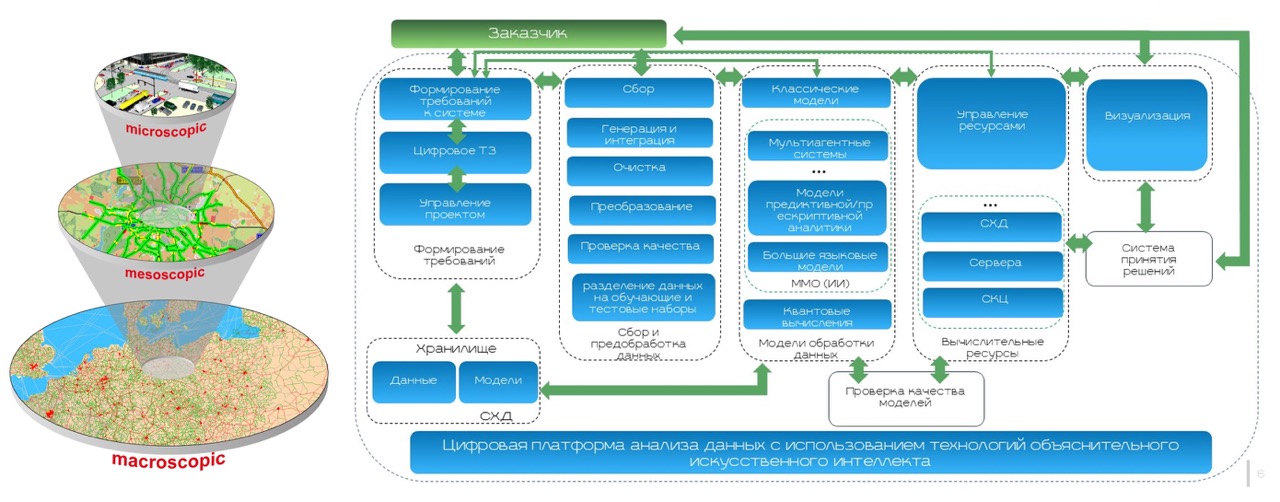
- Создание цифровой платформы для анализа данных транспортных систем как гибкого инструмента принятия решений по координированному развитию и управлению системами транспорта и транспортной инфраструктурой, внедрением высокоавтоматизированных видов транспорта на основе предиктивных моделей с применением гибридного искусственного интеллекта и данных геоинформационных систем.
Задачи проекта:
- Разработка инструментов оптимизации имитационных моделей транспортных систем с применением технологий искусственного интеллекта
- Разработка инструментов генерации обучающих выборок для машинного обучения на базе имитационных моделей транспортных систем
- Разработка инструментов прокси-моделирования транспортных систем для ускорения процессов прогнозирования и оптимизации с применением технологий искусственного интеллекта
- Разработка инструментов моделирования встраиваемых агентов, осуществляющих автоматическое и полуавтоматическое управление отдельными элементами сложных транспортных систем с применением технологий искусственного интеллекта
- Разработка комплексной методологии и комплекса программных средств проектирования сложных транспортных систем на базе технологий машинного обучения и имитационного моделирования
Вклад проекта в достижение технологического лидерства:
Проект способствует развитию передовых технологий в области анализа больших данных и искусственного интеллекта, что позволяет создать более эффективные и адаптивные транспортные системы.
Сфера применения:
Комплексное планирование развития транспортных систем городов и регионов с внедрением интеллектуальных транспортных и телекоммуникационных систем, включая автономные транспортные средства
Преимущества:
Возможность объединения в цифровой платформе данных из разнообразных источников, а также различных моделей для комплексного принятия решений по управлению транспортом
Партнеры

Основной результат в 2025:
Демонстрационный прототип цифровой платформы анализа данных транспортных систем с применением гибридного искусственного интеллекта (УГТ 3) с встроенными модулями оптимизации имитационных моделей транспортных систем и интегрированный с системой поддержки принятия решений по обслуживанию заданной территории транспортными средствами и системой обработки данных о дорожной обстановке.
Частные результаты:
- Методы, алгоритмы и программные средства оптимизации имитационных моделей транспортных систем с применением технологий искусственного интеллекта.
- Полнофункциональный прототип системы поддержки принятия решений по обслуживанию заданной территории высокоавтоматизированным транспортным средством с использованием данных, полученных от GNSS приемника и инерциальной системы навигации (УГТ-4).
- Полнофункциональный прототип программного обеспечения сбора и обработки данных о дорожной обстановке в осложненных климатических условиях с использованием алгоритмов гибридного искусственного интеллекта (УГТ-4).
Результат в 2030:
- Цифровая платформа анализа данных транспортных систем с применением гибридного искусственного интеллекта с расширенной функциональностью (УГТ 8).
- Программно-аппаратный комплекс системы управления ВАТС на основе цифровой платформы анализа данных транспортных систем с применением гибридного искусственного интеллекта с интегрированным ПО СУ ВАТС «Безопасное движение» и СППР (УГТ 8).
Ближайшие аналоги:
RITM3 — цифровая платформа для управления транспортной системой агломерации, региона, промышленного объекта
Функциональные характеристики / преимущества:
Возможность обработка мультимодальных данных транспортных систем из различных источников и объединение их в общую геоинформационную базу данных. Наличие функции предиктивной и прескриптивной аналитики
Технические характеристики:
Вероятность детектирования объектов дорожной обстановки до 0,95. Точность определение координат объектов дорожной обстановки до 5 см.
Общественно значимый результат:
После внедрения системы в сфере транспортного планирования городов и регионов ожидается повышение 5 качества жизни населения за счет повышения качества его транспортного обслуживание, сокращения времени в пути и снижения экологической нагрузки от транспорта. Также результаты исследований будут использованы при разработке национальных стандартов в сфере ИИ.